Hlavní strana
Tato verze Wiki je v procesu počáteční tvorby!
Hlavní strana se předělává.

Player Status systém (stav postavy), někdy také označován jako "Actor Status", sleduje různé vlastnosti hráčské postavy ve hře, včetně zdraví, vytrvalosti, hladiny kyslíky, hydratace, hladu a teploty. Hodnoty těchto atributů mohou mít dopad na vytrvalost a schopnost postavy. Chování NPC postav využívá tento systém k inteligentním rozhodnutím na základě jejich vlastního stavu…
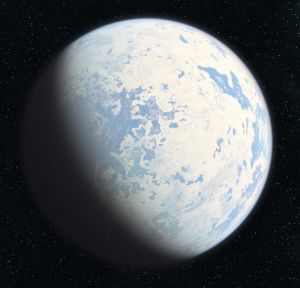
MicroTech (Stanton IV) je čtvrtá a nejvzdálenější planeta od centrální hvězdy v systému Stanton. Nachází se na vnějším okraji obyvatelné zóny systému. MicroTech je většinou tvořen ledem, s občasnými oblasti chladné až mírné tundry. Planeta byla zakoupena od UEE společnosti microTech v polovině 28. století. Jeho hlavní město, New Babbage, je domovem mnoha korporací a startupů a je také…
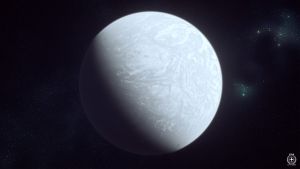
Tři měsíce microTechu, Calliope, Clio a Euterpe, se objeví ve hře s verzí 3.9. Jedná se o první měsíce, které využívají Planet Tech v4 už od samého začátku, a které přinášejí zvýšený standard kvality pro měsíce ve Star Citizen. A co víc, náš tým dokázal tyto měsíce vytvořit nejen ve vyšší kvalitě, ale i za mnohem kratší dobu, než jak by bylo možné s předchozími verzemi Planet Tech…
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Co to je to Star Citizen? • Co to je to Squadron 42? • Kdy hra vyjde? • Existují privátní servery? • Proč se lodě pořád předělávají? • Jak získat lodě, které nejsou ve hře? • Co je to LTI? • Mohu mít více postav? • Jak se přidám k organizaci? • Jaká povolání lze vykonávat? • Existuje ve hře housing? • Jaké lodě jsou ve hře? • Jaká je největší loď? • Proč vůbec existuje testovací server? • Co je to Evocati?…
text text text text text text text text text text text text text text text text text text text text text text text text